Master Arm¶
The Master Arm is a fully active robotic system, where all joints can move independently, unlike passive devices. Sharing the same joint configuration as the RB-Y1, it allows both task-level and joint-level mapping for teleoperation. Scaled to about 65% of the RB-Y1, the Master Arm is designed for user convenience, making it suitable for operation in smaller environments.
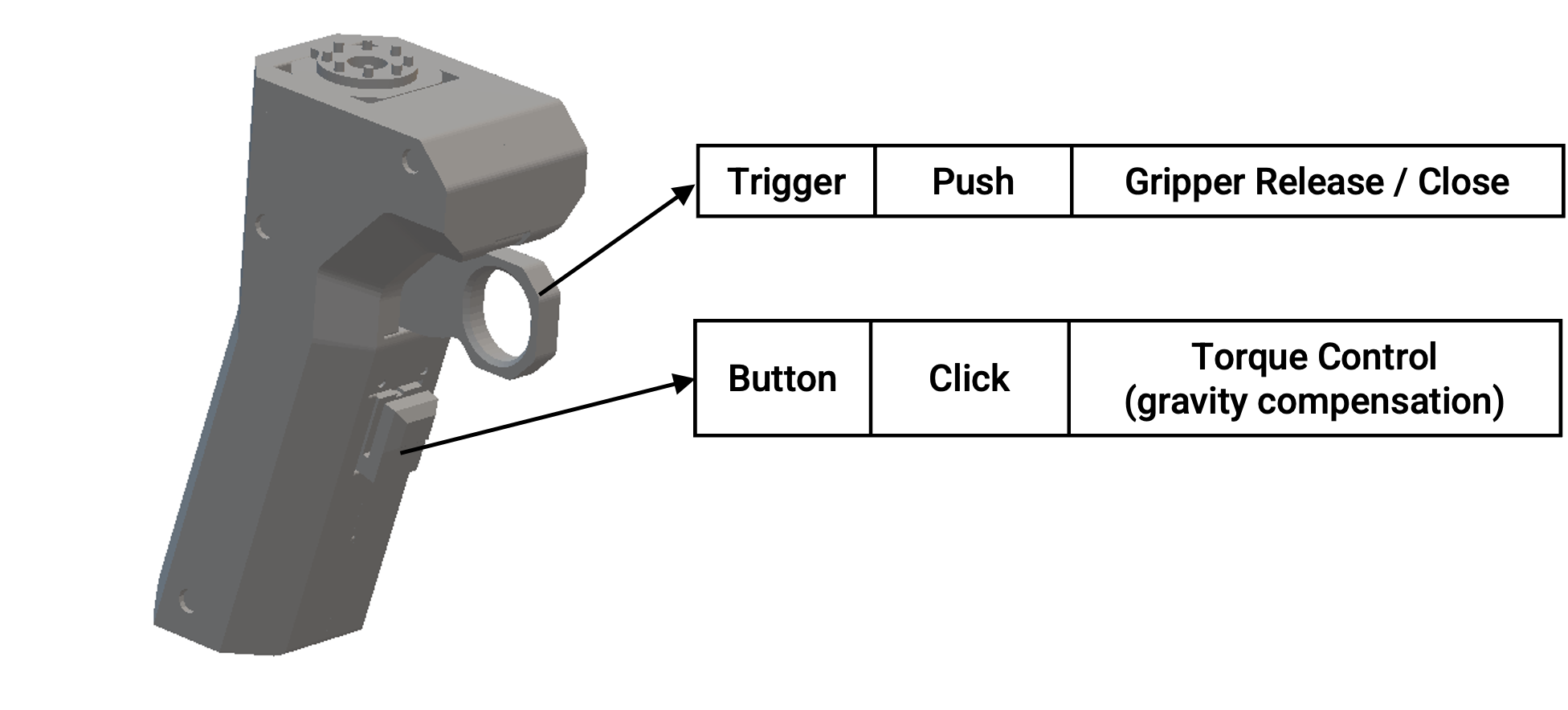
With redundant degrees of freedom, the Master Arm can perform identical tasks in various postures. For Master Arm control, press and hold the button to move the Master Arm in a gravity-compensated state, and release it to hold the current pose.

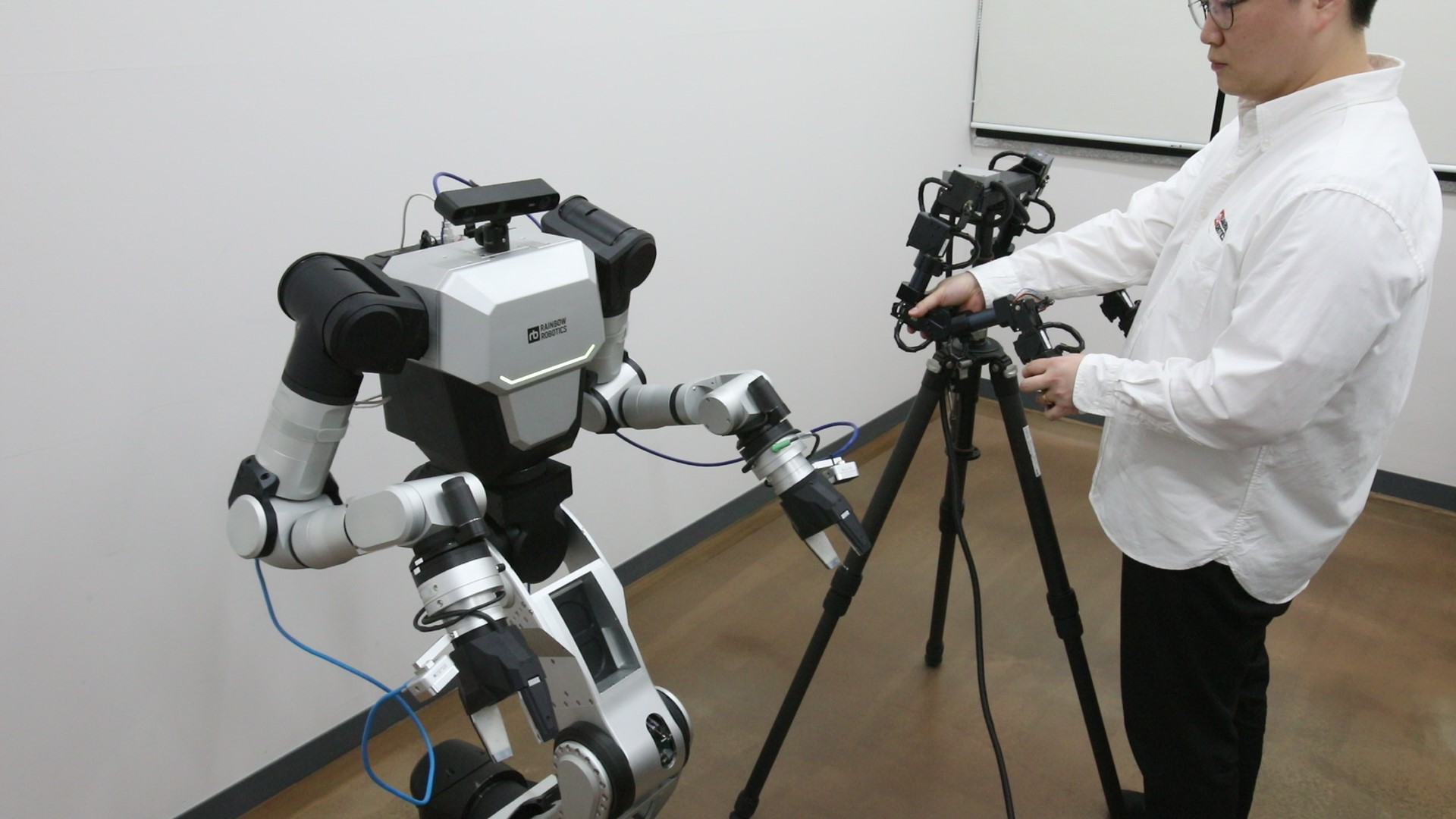
Mounted on a tripod, the system can be easily repositioned to control the robot from different perspectives and angles, providing flexibility in teleoperation setups.

This robotic system also features an intuitive handle equipped with a trigger and a button. Pressing the button makes the robot follow the Master Arm motion, and releasing the button engages a position lock, allowing precise control during teleoperation. The trigger is mapped to the gripper, making it easy to control.
The tripod makes it easy to place and reposition the Master Arm setup. This design gives operators the flexibility to control the robot from various positions and perspectives. By adjusting the tripod’s height and angle, users can set up the system optimally for their tasks.
