Overview¶
Technical Specifications¶
General Specifications¶
Attribute |
Value |
|---|---|
Size |
600 x 690 x 1,400 mm (W x D x H) |
Battery Capacity |
50 V, 25 Ah (1,270 Wh) |
Degrees of Freedom |
Model A: 24 DOF, Model M: 26 DOF |
Weight |
131 kg |
Arm Payload |
3 kg (per arm) |
Arm Reach |
600 mm (to wrist) + hand |
Joint Maximum Speed, Angle Range |
|
Power Supply Voltage |
48 VDC |
Ambient Operating Temperature |
Up to 40 °C |
Arm Repeatability |
< ±0.05 mm |
Exterior Materials |
Aluminum |
Mobile Base Speed |
1.5 m/s |
Degrees of Freedom¶
Model A DOF¶
Part |
# of DOF |
|---|---|
Wheel |
1 DOF × 2 |
Torso |
6 DOF |
Arm |
7 DOF × 2 |
Head |
2 DOF |
Total |
24 DOF |
Model M DOF¶
Part |
# of DOF |
|---|---|
Wheel |
1 DOF × 4 |
Torso |
6 DOF |
Arm |
7 DOF × 2 |
Head |
2 DOF |
Total |
24 DOF |
Weight¶
Model A Weight¶
Part |
Weight (kg) |
|---|---|
Upper body |
38 (Arm 11 × 2, Torso 16) |
Lower body |
42 |
Mobile base |
51 |
Total |
131 |
Model M Weight¶
Part |
Weight (kg) |
|---|---|
Upper body |
38 (Arm 11 × 2, Torso 16) |
Lower body |
42 |
Mobile base |
90 |
Total |
170 |
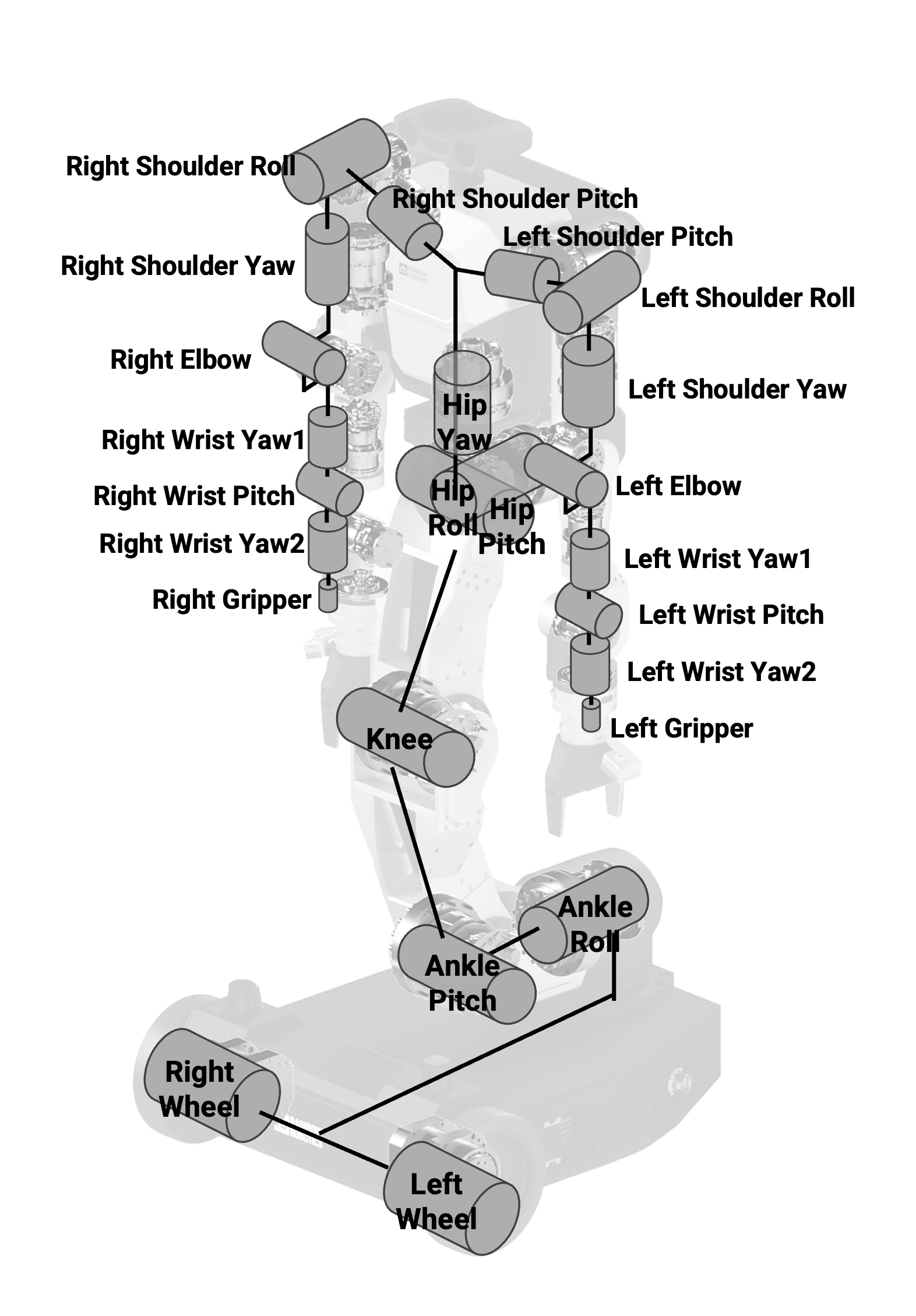
Joint Maximum Speed and Angle Range¶
Joint |
Speed |
Range |
|---|---|---|
torso_0 (Ankle roll) |
120°/s |
-15° ~ 15° |
torso_1 (Ankle pitch) |
120°/s |
-30° ~ 90° |
torso_2 (Knee) |
180°/s |
-150° ~ 90° |
torso_3 (Hip pitch) |
180°/s |
-45° ~ 90° |
torso_4 (Hip roll) |
180°/s |
-30° ~ 30° |
torso_5 (Hip yaw) |
180°/s |
-135° ~ 135° |
*_arm_0 (Shoulder pitch) |
180°/s |
-180° ~ 180° |
*_arm_1 (Shoulder roll) |
180°/s |
R : -180° ~ 0° L : 0° ~ 180° |
*_arm_2 (Shoulder yaw) |
180°/s |
-180° ~ 180° |
*_arm_3 (Elbow pitch) |
180°/s |
-150° ~ 0° |
*_arm_4 (Wrist yaw1) |
180°/s |
-180° ~ 180° |
*_arm_5 (Wrist pitch) |
180°/s |
-90° ~ 110° |
*_arm_6 (Wrist yaw2) |
180°/s |
-155° ~ 155° |
head_0 (Pan) |
180°/s |
-180° ~ 180° |
head_1 (Tilt) |
180°/s |
-180° ~ 180° |