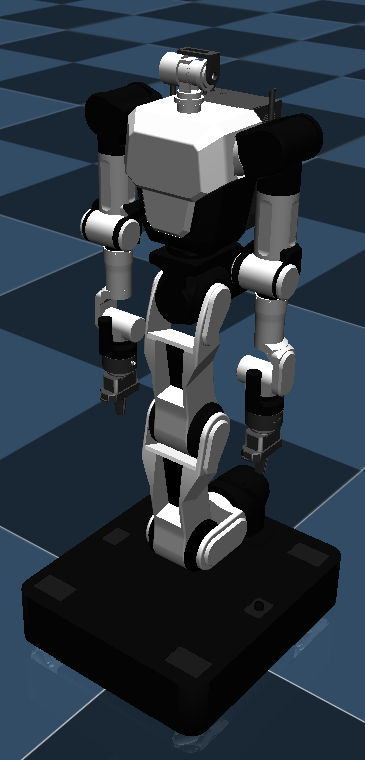
Model M¶
¶
Note
The most accurate information regarding the model can be found in the URDF files under the models directory of the Rainbow Robotics SDK repository. It is highly recommended to refer to this source for the latest updates and details.
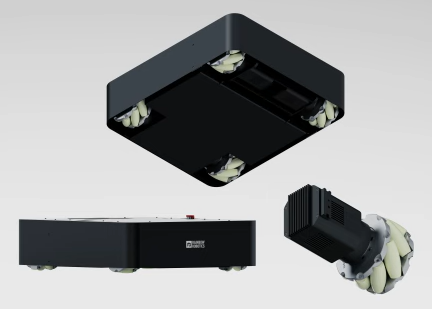
Mecanum Wheel
Degrees of Freedom (DOF)¶
Total DOF: 26
Joint Names¶
The joint names of the M model are as follows:
Wheels:
wheel_fr,wheel_fl,wheel_rr,wheel_rlTorso:
torso_0,torso_1,torso_2,torso_3,torso_4,torso_5Right Arm:
right_arm_0,right_arm_1,right_arm_2,right_arm_3,right_arm_4,right_arm_5,right_arm_6Left Arm:
left_arm_0,left_arm_1,left_arm_2,left_arm_3,left_arm_4,left_arm_5,left_arm_6Head:
head_0,head_1
Mobility Indexes¶
The indexes related to mobility are as follows:
Wheel FR(Front-Right) Index: 0
Wheel FL(Front-Left) Index: 1
Wheel RR(Rear-Right) Index: 2
Wheel RL(Rear-Left) Index: 3
Body Indexes¶
The indexes related to the body parts are as follows:
Torso Indexes: 4, 5, 6, 7, 8, 9
Right Arm Indexes: 10, 11, 12, 13, 14, 15, 16
Left Arm Indexes: 17, 18, 19, 20, 21, 22, 23
Head Indexes¶
The indexes related to the head parts are as follows:
Head Indexes: 24, 25
Brake and Motor Information¶
Components Without Brakes¶
The following components do not have brakes:
Wheels:
wheel_fr,wheel_fl,wheel_rr,wheel_rlRight Arm:
right_arm_6Left Arm:
left_arm_6
Parameter Lists¶
Parameter Name |
Default Value |
Min Value |
Max Value |
Unit |
|---|---|---|---|---|
|
“rby1m” |
- |
- |
|
|
“” |
- |
- |
|
|
[0, 44.7, 58.6, 1123.0, -61.587, 1.0168, -0.0045] |
- |
- |
|
0 |
0 |
1 |
||
1.0 |
0.0 |
10.0 |
sec |
|
15.0 |
0.0 |
30.0 |
sec |
|
3.0 |
0.0 |
10.0 |
sec |
|
[0, 0, -9.8] |
- |
- |
m/s² |
|
1.0 |
0.01 |
1.5 |
||
1.0 |
0.01 |
1.5 |
||
5.0 |
0.01 |
10.0 |
||
1.0 |
0.01 |
5.0 |
||
1e-3 |
1e-6 |
1e9 |
||
[1.0, 5.0, 99.0] |
- |
- |
||
0.087266463 (5°) |
0.017453293 (1°) |
0.17453293 (10°) |
rad |
|
0.1 |
1e-3 |
10.0 |
sec |
|
15.0 |
1e-3 |
100.0 |
Hz |
|
0.1 |
1e-3 |
1.0 |
sec |
|
15.0 |
1e-3 |
100.0 |
Hz |
|
0.1 |
1e-3 |
1.0 |
sec |
|
0.1 |
1e-3 |
1.0 |
sec |
|
0.1 |
1e-3 |
1.0 |
sec |
|
0.1 |
1e-3 |
1.0 |
sec |
Example Usage in Python¶
# Set parameters using the dot notation, following the provided examples
robot.set_parameter("default.acceleration_limit_scaling", "0.8")
robot.set_parameter("joint_position_command.cutoff_frequency", "5")
robot.set_parameter("cartesian_command.cutoff_frequency", "5")
robot.set_parameter("default.linear_acceleration_limit", "5")